MinebeaMitsumi delivers advanced sensing technologies designed to support the evolving requirements of robotics and automation. As robotic systems become more sophisticated, achieving accurate force control and repeatable performance—particularly in robotic hands—requires high-precision calibration supported by reliable sensor data.
MEMS 6-axis force/torque sensors from MinebeaMitsumi provide a robust solution for robotic hand calibration, enabling improved control accuracy, system consistency, and functional performance.
MEMS 6-Axis Sensors for Accurate Force Measurement
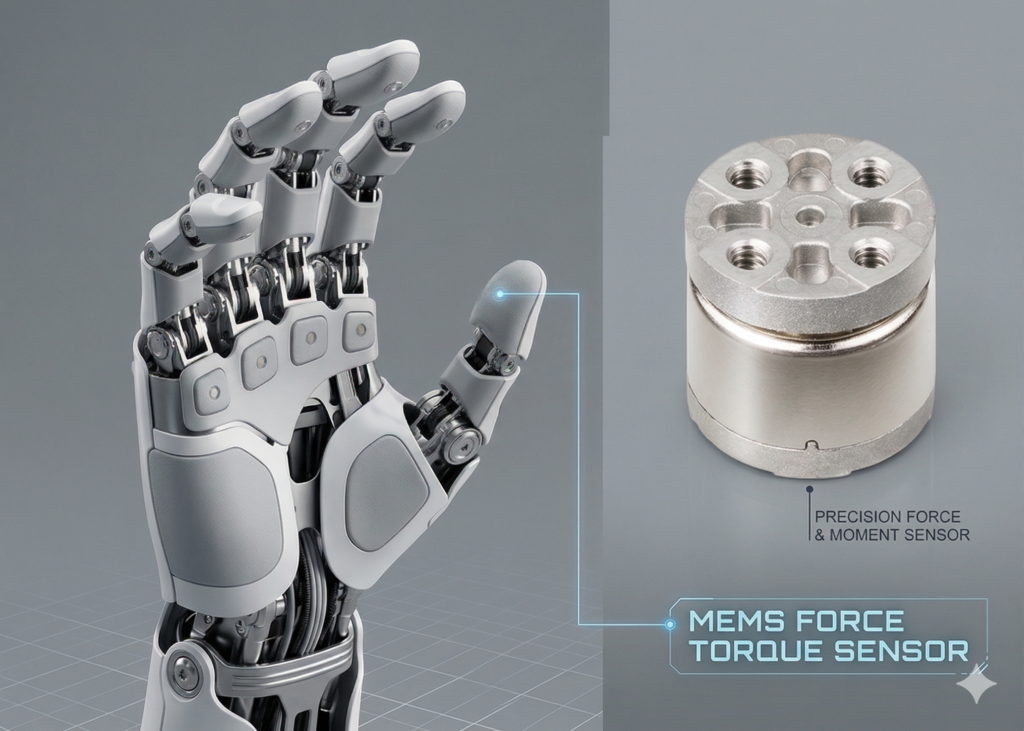
MinebeaMitsumi’s MEMS 6-axis force/torque sensors are engineered to measure forces and moments across three axes, providing comprehensive, real-time data for calibration and validation processes.
Core Capabilities:
- Multi-axis force and torque measurement (Fx, Fy, Fz, Mx, My, Mz)
- High sensitivity suitable for low-force detection
- Compact design for integration into calibration systems
- Stable and repeatable measurement performance
These sensors enable direct measurement of interaction forces at the robotic fingertip, allowing accurate characterization of system behavior under real operating conditions.
Improving Calibration and System Performance
By incorporating MEMS sensor data into the calibration process, robotic systems can establish a precise relationship between motor current and actual force output.
Typical calibration workflow:
- Controlled force is applied by the robotic finger to the sensor
- Sensor data is collected across defined operating conditions
- Calibration models are generated to map input (current) to output (force)
This process supports both linear and non-linear system modeling and can be extended to various motion profiles, including:
- Gripping and releasing
- Pushing and pulling
- Sliding and contact interaction
- Multi-actuator coordination
The result is improved force control accuracy, repeatability, and operational stability.
Enabling Advanced Robotic Applications
MEMS 6-axis force/torque sensors contribute to enhanced performance across a wide range of robotic applications, including:
- Humanoid robotic hands
- Precision robotic grippers
- Industrial automation systems
- Service and collaborative robots
While embedded tactile sensing continues to evolve, external calibration using high-precision MEMS sensors remains an effective approach for improving system-level performance.
MinebeaMitsumi: Precision Components for Robotics
MinebeaMitsumi combines expertise in precision components, motion technologies, and sensing solutions to support advanced robotics development. By delivering reliable, high-performance MEMS sensors, the company enables manufacturers to optimize robotic systems for accuracy, efficiency, and consistency.
Conclusion
Accurate calibration is critical to achieving reliable force control in robotic hands. MinebeaMitsumi’s MEMS 6-axis force/torque sensors provide the measurement precision required to improve system performance and support the development of next-generation robotic solutions.